
De intelligente van het de Assemblagemateriaal van het Batterijpak Elektrische Cel die Machine vastbinden
1. Ontwerpbehoeften van elektrische cel die machine vastbinden:
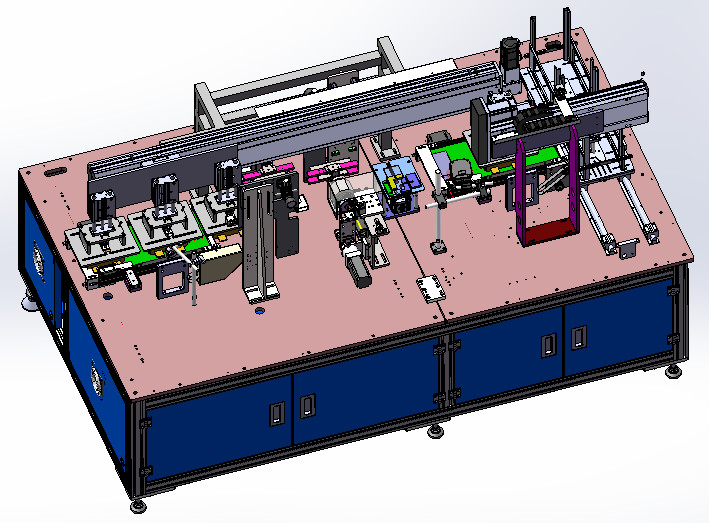
1.1. Het materiaal is gebaseerd op de vereisten van het procesontwerp van de batterij vastbindend machine, en de batterij intelligente automatische het vastbinden machine wordt vervaardigd gebaseerd op de industrie 4,0 ontwerp. De productielijn omvat: het voeden mechanisme, voedende manipulator, stapelende en plaatsende post, het bundelen positie, het bespuiten positie, en het lossen van lijn
1.3. Voorwaarden van gebruik:
1.3.1 voedingvoorwaarden: hoofdvoeding: 220V±15%
1.3.2 samengeperste lucht: ≥ 0.5mpa, 10L/30Min
1.3.3 omgevingstemperatuur: 0℃ ~ 40℃.
1.3.4 relatieve vochtigheid: 10 ~ 60%RH
1.4. Productievereisten:
1.4.1 verschijningsvereisten:
de eenvormige verschijning van 1.4.1.1, geen misvorming;
1.4.1.2 geen speldeprik, stroomteken, of andere tekorten;
1.4.2 groottevereisten:
1.4.2.1. Productbreedte 35100mm.
1.4.2.2-productlengte: 50150mm
1.4.2.3-de dikte van de productmuur: 3.812mm
1.4.3 batterijstreepjescode
1.4.3.1. Voor de voorzijde, gebruik de laserqrcode of kleef de streepjescode
1.5. Prestatie-eisen van de batterij die machine vastbinden:
Vereisten die in de normale productieomstandigheden moeten worden voldaan aan; Het voeden mechanisme, plaatsende mechanisme, van het bereikmechanisme, van het bandmechanisme, van het manipulatormechanisme, stabiele en betrouwbare, eenvoudige verrichting; Alle bewegende delen zouden redelijk moeten hebben, betrouwbaar, gemakkelijk om smeringsmechanisme in werking te stellen.
1.5 schematisch diagram van materiaal
1.5.1 de grootte van het materiaalberoep (eenheid: mm): 2300*1300*1500 (de hoogte van de lengte * breedte *)
2. Belangrijkste onderdelen van elektrische cel die machine vastbinden:
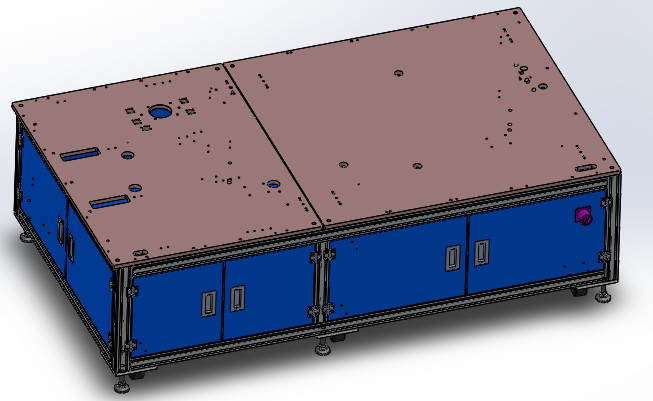
2.1, het rek
2.2.1 het kadersysteem wordt geassembleerd met 30X60-aluminiumprofielen en A3-de delen van het bladmetaal.
2.2. Ladingspost van schotelmateriaal
2.2.1 ontwerpvereisten
2.2.1.1 die macht voeden wordt gedreven door cilinder en twee het voeden dozen. Er zijn plaatsende schotten op de linkerzijde en de rechterkanten, opheffend mechanisme,
Één kant is uitgerust met foto-elektrische opsporingsschakelaar
2.2.1.2-procesparameters: de het plaatsen breedte kan volgens de grootte van de batterij worden aangepast. Het hand het voeden niveau is ongeveer drie posten, en de middenmanipulator vergt het het voeden niveau
2.2.2 hoofdmateriaalconfiguratie
| Het serienummer | Systeemsamenstelling | De systeemconfiguratie | Het aantal van |
| 1 | Overdrachtsysteem | cilinder | 1 |
| Gladde cursus | 2 | ||
| 2 |
Plaatsend systeem (GPS)
|
Artikel plaatsend blok | 4 |
|
Machinaal bewerkt deel
|
1 | ||
| bak | 2 | ||
| Het plukken platform | 1 | ||
| 3 | 升 het liftsysteem | Opheffende motor | 1 |
| Het opheffen schroefreeks | 1 |
2.2.3 functie: zet manueel de batterij van de gehele stapel schijfmaterialen op de materiële doos, ontdekt de foto-elektrische opsporingsschakelaar dat de cilinder van het materiaal wordt overgebracht naar de middenplaats en wacht op de voedende manipulator om het materiaal op te nemen, en de twee het voeden dozen doorgeeft het voeden
2.3 batterij voedende manipulator
2.3.2. Hoofddelen van materiaal
2.3.2.1. Batterij het voeden hand: het is samengesteld uit servomotor, de module van de loodschroef, nabijheidsschakelaar, opheffende cilinder, de groep van de zuigingsplaat, enz. De structuur is eenvoudig en praktisch.
2.3.2.1 .1: de beweging van de uitlopersgroep wordt gecontroleerd door servomotor van schroefmodule voor het nauwkeurige plaatsen. Beschikbare de batterij van de nabijheidsschakelaar.
2.3.2.1 .2: het werkstuk is geschikt, ononderbroken, stabiel en betrouwbaar.
2.4 functie: trek de batterij in het dienblad aan het mechanisme van de batterijoverdracht en het lege dienblad aan het lege mechanisme van de dienbladinzameling
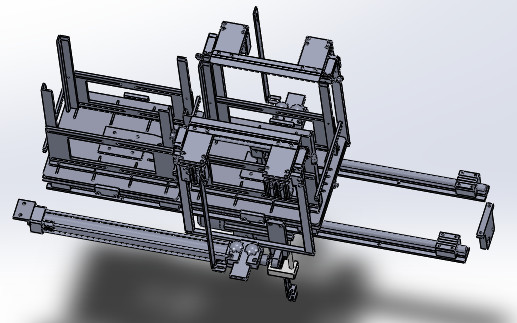
2.4 het mechanisme van de batterijoverdracht
24.1.1. Het mechanisme van de batterijtransmissie: dit mechanisme is hoofdzakelijk samengesteld uit het stappen motor, riem, steun, plaatsende cilinder, nabijheidsschakelaar, enz.
2.4.2.1-machtsmechanisme: regelbare snelheid.
2.4.2.2. De batterij wordt verzekerd zonder schade aan de batterij door het plaatsen het bewerken
2.4.2.3-de positie van het plaatsen het bewerken en batterij kan gemakkelijk, met het plaatsen nauwkeurigheid ≤± 0.1mm worden aangepast
2.4.2.4-riemriem die mechanisme spannen
2.4.2.5-de basis, het mechanisme is hoofdzakelijk samengesteld uit grondplaat en de plaatsende speld, het plaatsen speld het plaatsen, verzekert stabiliteit en betrouwbaarheid, eenvoudige verrichting.
2.4.3 functie: breng de batterij van de voedende manipulator in de positie over en wacht op de metende manipulator van de voltageweerstand om het materiaal op te nemen
2.5.1.1. Aftastenmechanisme: dit mechanisme is hoofdzakelijk samengesteld uit steun, aftastend kanon, enz.
2.5.2.1-de Hoek van de steunhoogte kan willekeurig worden aangepast
2.5.3 functie: tast de qrcode inzake de batterijoppervlakte af om de oorspronkelijke gegevens van de batterij te verzamelen en het over te brengen aan het computersysteem.
2.6.1.1 het apparaat etc. hoofdzakelijk samengesteld uit steun, opheffende cilinder, foto-elektrische sensorsonde, blok is.
2.6.2.1 de steun willekeurig volgens de batterijgrootte kan worden aangepast
2.6.3 functie: de stapel en plaatst de cel.
2.7.1.1. Omwentelingsmechanisme: dit mechanisme is hoofdzakelijk samengesteld uit het stappen motor, riem, steun, plaatsende cilinder, nabijheidsschakelaar, enz.
2.7.2.1-band die mechanisme plaatsen: regelbare snelheid,
2.7.2.2. De batterij wordt verzekerd zonder schade aan de batterij door het plaatsen het bewerken
2.7.2.3. Het plaatsen het bewerken en de batterij kunnen, met het plaatsen nauwkeurigheid ≤± 0.1mm gemakshalve worden aangepast
2.7.2.4-riemriem die mechanisme spannen
2.7.2.5-de basis, het mechanisme is hoofdzakelijk samengesteld uit grondplaat en de plaatsende speld, het plaatsen speld het plaatsen, verzekert stabiliteit en betrouwbaarheid, eenvoudige verrichting.
2.7.3 functie: bind samen de elektrische cellen vast die uit de horizontale manipulator worden genomen
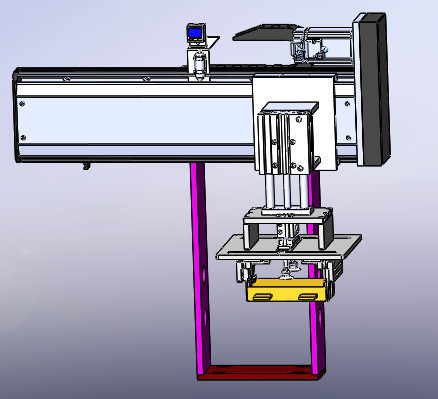
2.8.1.1 die manipulator voeden: dit mechanisme is hoofdzakelijk samengesteld uit steun, opheffende cilinder, de module van de schroefstaaf, zuigingsschijf, regelende staaf, enz.
2.8.2.1 de steun willekeurig volgens de batterijgrootte kan worden aangepast
2.8.3 functie: neem de batterij van het mechanisme van de celoverdracht aan de het vastbinden plaatsende kaliberassemblage
2.9.1.1. Codeer aftastenmechanisme: dit mechanisme is hoofdzakelijk samengesteld uit steun, codekanon, enz.
2.9.2.1-de Hoek van de steunhoogte kan willekeurig worden aangepast
2.9.3 functie: volgens de batterijtypes die door de reeks van de gegevensanalyse van het computersysteem worden geclassificeerd, worden de verschillende codes bespoten op de batterijoppervlakte.
2.10.1.1. Het mechanisme van de batterijtransmissie: dit mechanisme is hoofdzakelijk samengesteld uit het stappen motor, riem, steun, plaatsende cilinder, nabijheidsschakelaar, enz.
2.10.2.1-machtsmechanisme: regelbare snelheid,
2.10.2.2. Geen schade aan de batterij is gewaarborgd door het plaatsen het bewerken
2.10.2.3. De plaatsende hulpmiddelen en de batterijen kunnen gemakkelijk, met het plaatsen nauwkeurigheid ≤± 0.1mm worden aangepast
2.10.2.4-riemriem die mechanisme spannen
2.10.2.5-de basis, het mechanisme is hoofdzakelijk samengesteld uit grondplaat en de plaatsende speld, het plaatsen speld het plaatsen, verzekert stabiliteit en betrouwbaarheid, eenvoudige verrichting.
2.10.3 functie: de batterij die uit de horizontale manipulator wordt genomen wacht op de code die op het materiële niveau van de robot worden moet bespoten en worden geleverd
1. Nieuwe materiaalbelofte
Ons bedrijf waarborgt dat de goederen die aan klanten worden verstrekt gloednieuw, volledig en ongebruikt materiaal zijn.
2. Vertrouwelijkheidsverplichting
Ons bedrijf belooft dat zonder de geschreven toestemming van enige partij, de verwante tekeningen van andere partij, technische informatie, de bedrijfsinformatie en andere bedrijfsgeheimen en de technische geheimen aan derde partijen moeten in geen geval worden gelekt.
3. De verplichting van de naverkoopdienst
(1) twee maanden vanaf de datum van verzending van het materiaal, Partij B is de oorzaak van non-human fouten in een geschikte en vrije garantie binnen één jaar (wanneer het materiaal defect is, zal het personeel van de naverkoopdienst binnen 2 uren na het ontvangen van het bericht antwoorden. Volgens de situatie, moet het personeel op zijn plaats binnen 48 uren zijn. Niet later dan 60 uren, om de continuïteit van productie door de koper te verzekeren;
(2) na het materiaal de garantieperiode, als er een probleem is, de twee partijen meedelen en behandelen het heeft overgegaan. Indien nodig, zal het naverkooppersoneel worden gestuurd om het te herstellen, en slechts zullen de kosten worden geladen. Zh
(3) tijdens de garantieperiode die in het contract en de technische overeenkomst wordt bepaald die door de twee partijen wordt ondertekend, zal het bedrijf een garantie voor kwaliteitsproblemen verstrekken die niet door menselijke schade tijdens het normale gebruik van onze producten worden veroorzaakt.













