| Serienummer |
systeemsamenstelling |
Systeemconfiguratie |
Hoeveelheid |
| 1 |
Reksysteem |
|
1 reeks |
| De vierkante structuur van het lassenkader |
1 |
| Substraat (het plateren van de staalplaat) |
2 |
| 2 |
Batterij het laden systeem |
|
1 reeks |
| Materiële bak |
1 |
| Sorterend dienblad |
1 |
| Materieel veranderend mechanisme van materiële doos |
1 |
| Transportbandmechanisme |
1 |
| Batterij opheffend mechanisme |
1 |
| 3 |
Servo sorterend systeem |
|
1 reeks |
| Het systeem van de servomotorcontrole |
1 |
| Batterijzuignap |
1 |
| Cilinder |
10 |
| Lineaire gids |
1 |
| Batterij plaatsbepalingsblok |
1 |
| 4 |
automatisch controlesysteem |
|
1 |
| |
Het mechanisme van de sondeopsporing |
30 |
| |
Intern de Weerstandsmeetapparaat van het batterijvoltage (Kaya Hioki 3560, Japan) |
2 |
| 5 |
Automatisch blanking systeem |
|
1 |
| |
Sorterend tijdschrift |
1 |
| |
Materieel het verdelen mechanisme |
1 |
| 6 |
Greep mobiel systeem |
|
1 |
| |
Het mechanisme van de servomotorcontrole |
1 |
| |
Het mechanisme van de balschroef |
1 |
| |
Het vastklemmen mechanisme |
1 |
| 7 |
Besturingssysteem |
|
1 reeks |
| |
Monitor |
1 |
| |
IPC |
1 |
| 8 |
Controlesysteem |
|
1 reeks |
| |
PLC |
1 |
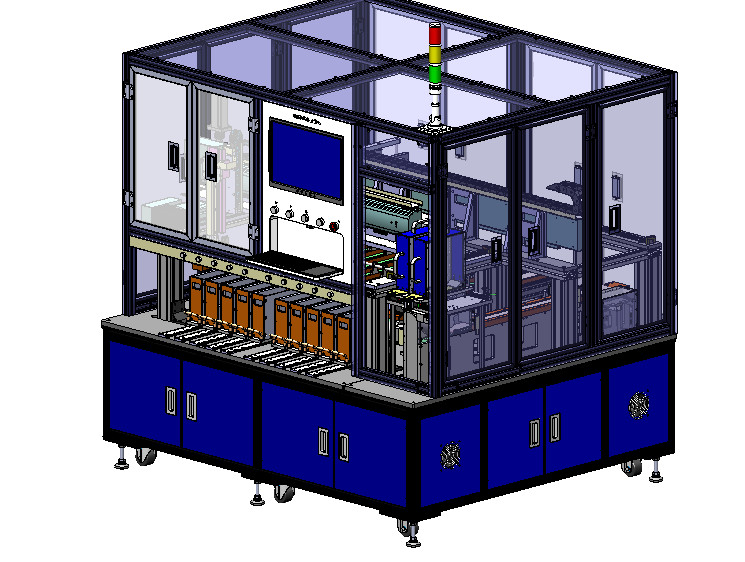
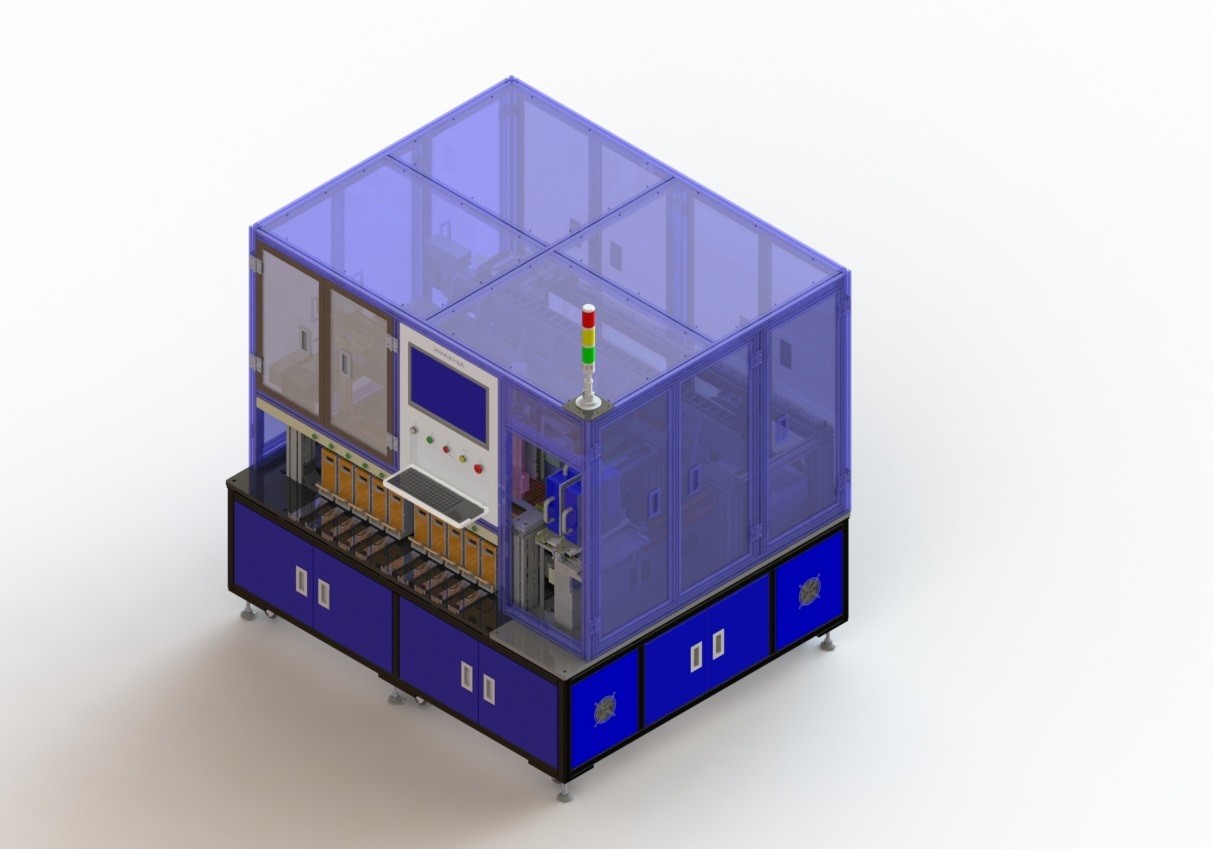
3. Mechanische specificaties
Belangrijkste onderdelen van het materiaal: het materiaal bestaat uit een het voeden systeem, het automatische rangschikken, een automatische opsporingspost, een sorterende manipulator, een automatisch het lossen mechanisme (10 posities), een ladende manipulator, een materiële ontvangende doos en een controlesysteem.
3.1 automatisch het Voeden Systeem
In dit proces, wordt de volledige batterijcel manueel geplaatst in de het laden post, is de grondplaat getrokken open, automatisch roteert de draaischijf, wordt de batterij geselecteerd aan de transportband door de draaischijf, roteert de transportband, en de batterij wordt aan de batterij vervoerd die positie meten.
3.2 servo Vervoerend en Sorterend Systeem
De servomotormanipulator drijft de geteste batterijen om de batterijen te bewegen en te zetten in verschillende sporen respectievelijk volgens de meetresultaten. De batterij wordt gegrepen in het plaatsende blok door zuiging. Wanneer de batterij de overeenkomstige positie bereikt, trekt de luchtcilinder en zet de batterij in het overeenkomstige sorterende spoor in.
3.3 automatisch Opsporingssysteem
De opsporingspositie ontdekt automatisch de interne weerstand of het voltage van de batterij, en de batterij is in een statische staat tijdens opsporing. De opsporingssondes zijn vier naalden, twee voor voltageopsporing en twee voor weerstandsopsporing.
3.4 automatisch Sorterend en Vervoerend Systeem (10 Kanalen)
Volgens de opsporingsresultaten, zijn de batterijen geclassificeerd in 10 situaties. Nadat de servo vervoerende manipulator de batterijen in het overeenkomstige toestel zet, schikt de transportband automatisch de batterijen. Wanneer het aantal batterijen 10 bereikt, ontdekt de sensor de batterijen en geeft een signaal, en de verpakkingsmanipulator grijpt automatisch de batterijen en pakt hen in.
3.5 het Systeem van de verpakkingsmanipulator: Nadat de sensor ontdekt dat het aantal batterijen in het sorterende kanaal de hoeveelheid bereikt, zal de manipulator automatisch de batterijen grijpen en zal hen in de overeenkomstige bakken zetten.
3.6 het leven van de testnaald is meer dan 300.000 keer. (en herinner automatisch eraan om de sonde te vervangen);
Het interne meetapparaat van het weerstandsvoltage van het systeem is een geselecteerd product (de klant kan specificeren).
3.7 het ontvangen van Doossysteem
Het materiaal is uitgerust met 10 reeksen van materiaal die dozen ontvangen, elk waarvan kan afzonderlijk worden genomen en worden geplaatst, en de sensor ontdekt de aanwezigheid of de afwezigheid van materiële dozen.
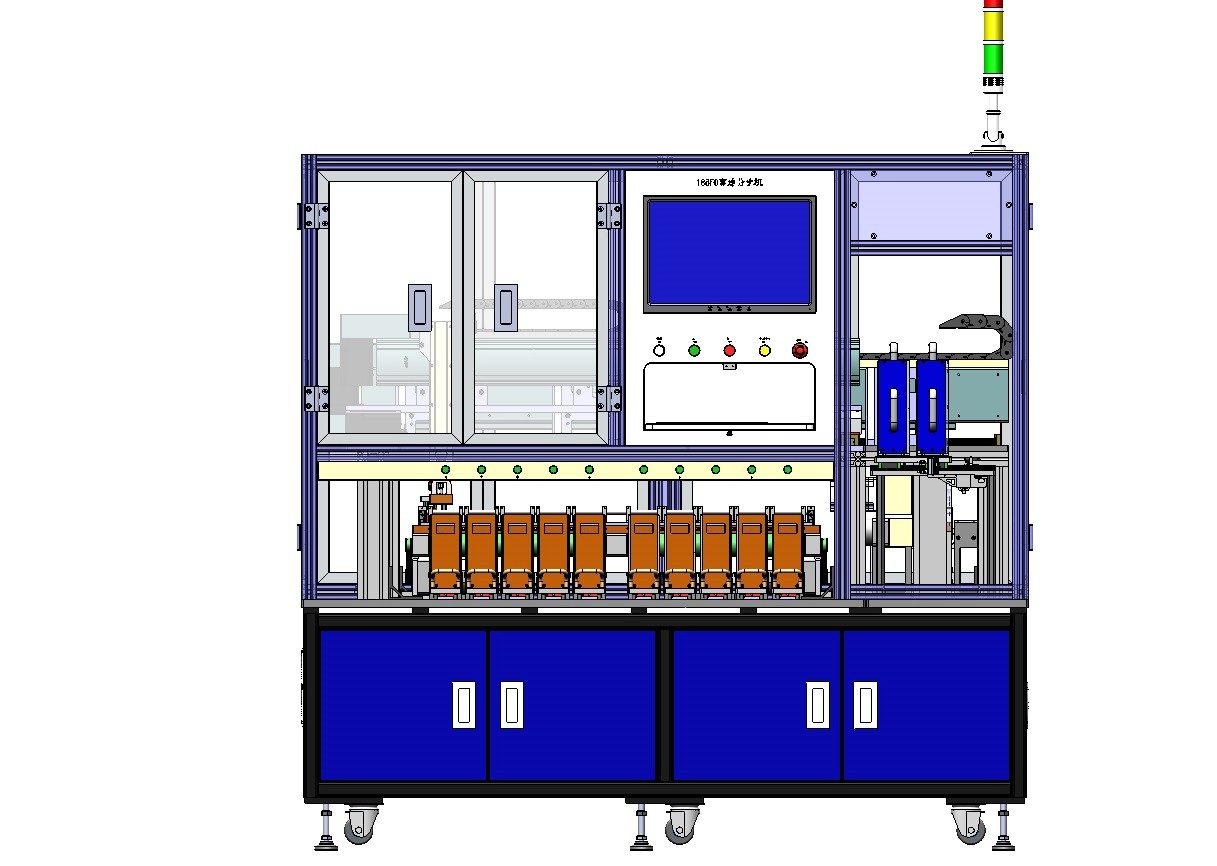
3.8 besturingssysteem
Het kan met een vertoning worden in werking gesteld. Het verrichtingspaneel is uitgerust met opstarten, noodsituatieeinde, machtsschakelaar, enz. De van het schermvertoningen van de computervertoning de databasegegevens.
3.9 controlebord
De machine wordt intern voorzien van een onafhankelijke elektroraad, en intern voorzien van de componenten van de machtskring zoals een lekkageschakelaar, een stabiele voeding van gelijkstroom en dergelijke, PLC voor controle, relais, de apparaten van de motorcontrole en dergelijke. De verbinding met de buitenkant zal door schakelaars en eindblokken worden gemaakt. Het plafond van de machtskabel wordt geperforeerd. De kabels en de luchtpijpen tussen ander materiaal zullen bij het lagere deel worden getelegrafeerd en worden door buizen geleid.
4.Cooperation verplichting
1. Nieuwe materiaalbelofte
Ons die bedrijf waarborgt dat de goederen aan klanten worden verstrekt gloednieuw, volledig en ongebruikt materiaal zijn.
2. Vertrouwelijkheidsverplichting
Ons bedrijf belooft dat zonder de geschreven toestemming van enige partij, de verwante tekeningen van andere partij, technische informatie, de bedrijfsinformatie en andere bedrijfsgeheimen en de technische geheimen aan derde partijen moeten in geen geval worden gelekt.
3. De verplichting van de naverkoopdienst
(1) twee maanden vanaf de datum van verzending van het materiaal, Partij B is de oorzaak van non-human fouten in een geschikte en vrije garantie binnen één jaar (wanneer het materiaal defect is, zal het personeel van de naverkoopdienst binnen 2 uren na het ontvangen van het bericht antwoorden. Volgens de situatie, moet het personeel op zijn plaats binnen 48 uren zijn. Niet later dan 60 uren, om de continuïteit van productie door de koper te verzekeren;
(2) na het materiaal de garantieperiode, als er een probleem is, de twee partijen meedelen en behandelen het heeft overgegaan. Indien nodig, zal het naverkooppersoneel worden gestuurd om het te herstellen, en slechts zullen de kosten worden geladen. Zh
(3) die tijdens de garantieperiode in het contract en de technische die overeenkomst wordt bepaald door de twee partijen wordt ondertekend, zal het bedrijf een garantie voor kwaliteitsproblemen verstrekken die niet door menselijke schade tijdens het normale gebruik van onze producten worden veroorzaakt.